
Описание Motor Shield
Motor Shield (далее M–Shield) – силовой модуль управления двигателями для микроконтроллеров серии Freeduino/Arduino. Модуль предназначен для упрощения разработки моторизированных и робототехнических устройств и основан на первой версии M–Shield от Adafruit Industries (www.ladyada.net).
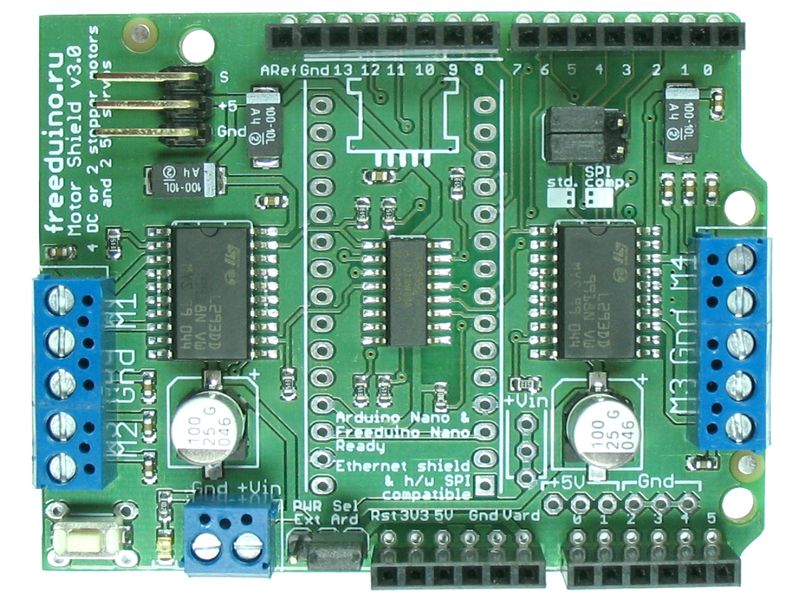
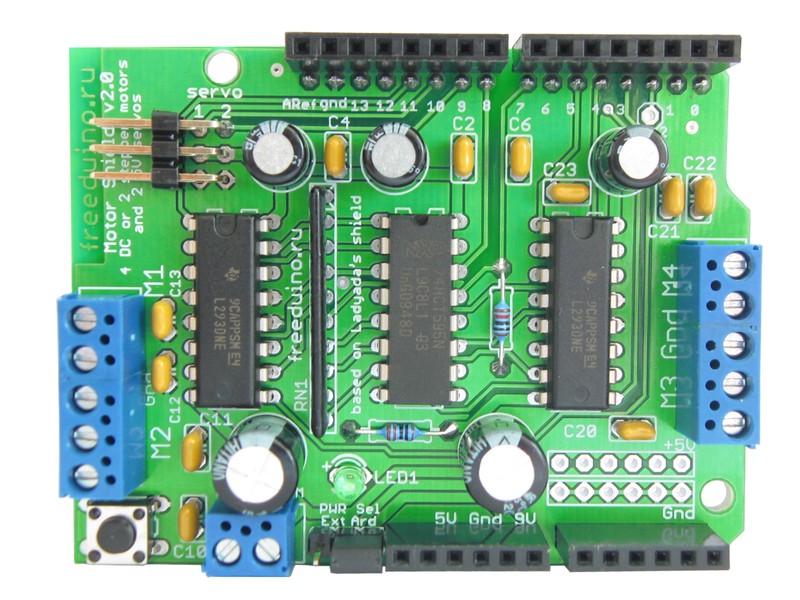
Модуль существует в двух версиях: v2 со штыревыми компонентами, и пришедшая ей на замену v3 с поверхностным монтажом компонентов и дополнительным функционалом.
Модуль подключается к Freeduino с помощью установленных на нем разъемов.
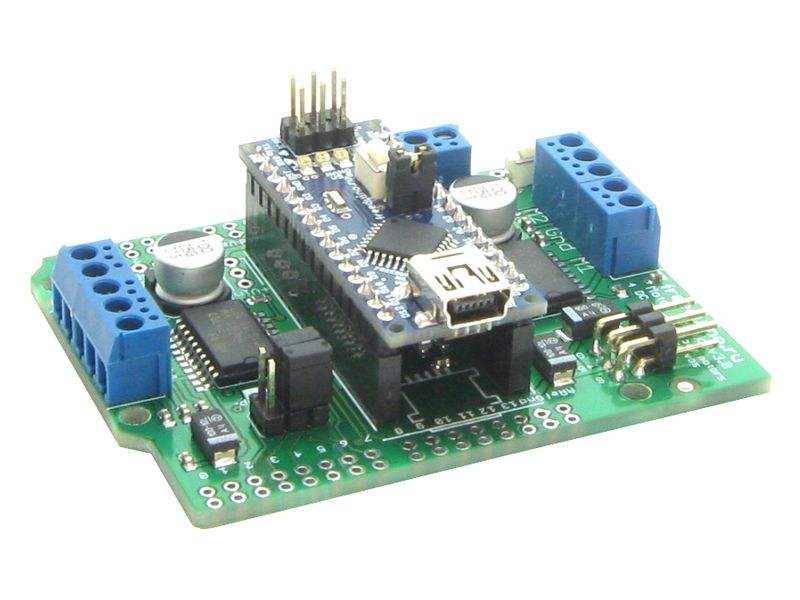
Обновленная версия M-Shield v3:

Предыдущая версия с штыревым монтажом M-Shield v2:
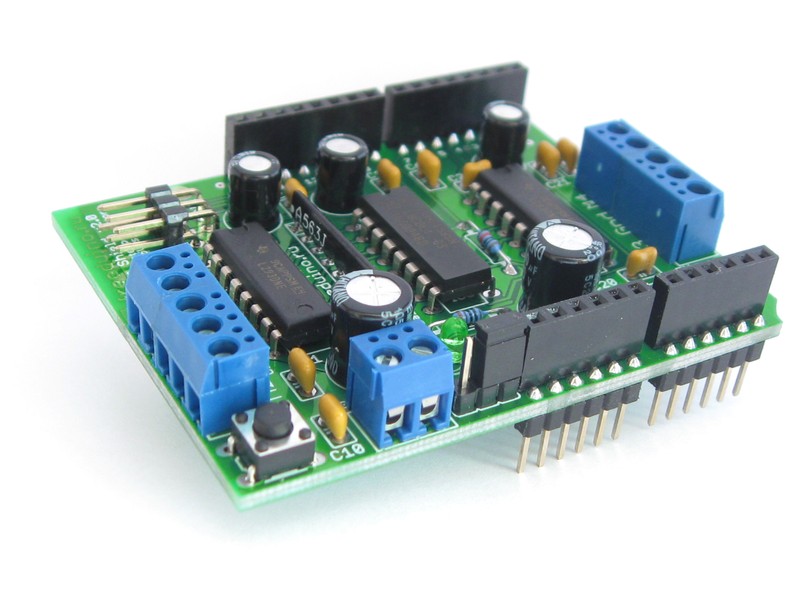
Модуль также доступен в виде набора для сборки (Kit).

Технические возможности M–Shield позволяют реализовать разнообразные проекты, связанные с подключением и управлением слаботочными двигателями следующих типов:
- четырёх двигателей постоянного тока (ДПТ - DC motors);
- двух шаговых двигателей униполярных или биполярных с одинарной или двойной обмоткой (ШД - stepper motors);
- двух 5В сервоприводов (СП - servos).

Возможны следующие комбинации подключаемых к M–shield двигателей:
- 2 СП + 4 ДПТ;
- 2 СП + 2 ШД;
- 2 СП + комбинации ШД и ДПТ, например: возможен вариант замены 1 ШД на 2 ДПТ или наоборот.
Обновленная версия v3 может быть переключена в режим, совместимый с аппаратным SPI (а значит и с модулями типа Ethernet Shield), в котором не используются выводы 10, 11, 12, 13. Также, для v3 возможно простое подключение к базовой плате в формате Nano.
Технические характеристики
- напряжение питания: +7...+ 24 В;
- количество силовых каналов: 4;
- максимально-продолжительный ток каждого канала: 0,6 А;
- напряжение питания сервоприводов: 5 В;
- возможность реверса каждого двигателя;
- возможность независимого управления каждым каналом;
- модуль полностью совместим со всеми известными моделями Freeduino/Arduino: MaxSerial, Through-Hole, Diecimila, 2009, Duemilanove, а также Arduino Mega. Версия v3 может удобно стыковаться с Freeduino/Arduino Nano.
Принципиальная схема v3, принципиальная схема v2 по лицензии Creative Commons Attribution-ShareAlike 2.5
{kind=link}
{kind=link}
Драйвер двигателей L293D
Управление двигателями осуществляется двумя микросхемами L293D. Каждая микросхема – это четырёхканальный драйвер со встроенными обратными диодами для защиты микросхемы от перенапряжений при работе на индуктивную нагрузку.
Драйверы управляются парами, что позволяет реализовать на одной микросхеме два двуполярных канала управления с ШИМ управлением.
Основные характеристики микросхемы:
- напряжение питания: +4,5... +36 В;
- максимальный продолжительный ток в каждом канале: 0,6 А;
- максимальный пиковый (<100 мс) неповторяющийся ток в каждом канале: 1,2 А;
- защита от перегрева.
Более полное описание можно найти в оригинальной документации производителя:
http://focus.ti.com/lit/ds/symlink/l293d.pdfпросмотр
http://www.freeduino.ru/arduino/files/l293d.pdfпросмотр
Питание.
В принципиальной электрической схеме M-Shield существуют две отдельные цепи питающего напряжения: слаботочная и силовая.
Питание слаботочной сигнальной цепи, а также подключаемых сервомоторов осуществляется от стабилизированного +5 В источника Freeduino. Недопустимо использовать эту цепь для питания двигателей постоянного тока, т.к. это приведет или к срабатыванию USB предохранителя или перегреву и выходу из строя стабилизатора напряжения +5 В на плате Freeduino.
Выбор источника питания силовой части модуля осуществляется при помощи джампера питания на M-shield: либо от источника внешнего питания +7...+12 В управляющей платы Freeduino, либо от дополнительного источника постоянного напряжения +6...+ 24 В, подключаемого к двум клеммам разъема питания на M-Shield.
Крайнее левое положение джампера выбора источника питания соответствует подключению внешнего источника питания +6... +24 В силовой части модуля, при этом цепь питания Freeduino/Arduino отключена.
Крайнее правое положение джампера соответствует питанию +7...+12 В от основной платы Freeduino/Arduino.
Перед подключением внешнего источника питания к клеммам M–shield обязательно убедитесь в правильности установки джампера питания, поскольку неверная его установка может привести к замыканию двух источников.
На рисунке приведена схема, поясняющая электрические соединения шин питания основной платы Freeduino/Arduino совместно и модуля M-Shield. 3-й штекер джампера питания не связан ни с одной из электрических цепей и предназначен для предотвращения утери перемычки при её переключении из одного положения в другое.

В настоящей версии M–Shield верхнее значение напряжения питания ограничено используемыми электролитическими конденсаторами на максимальное напряжение 25 В и может быть увеличено до максимального для микросхемы L293D значения 36 В заменой конденсаторов С7 и С8.
Особенности версии v3
Обновленная версия v3 модуля M-Shield в основном подобна предыдущей версии v2, но выполнена с применением поверхностного монтажа.
Первое важное отличие – возможность работы в режиме совместимости с аппаратным SPI. Оригинальный модуль от Adafruit Industries, как и версия M-Shield v2, в числе прочих задействует вывод 12 для управления микросхемой 74HCT595 и вывод 11 для ШИМ, и поэтому несовместимы с аппаратным SPI, и в частности с Ethernet Shield.
В версии v3 можно с помощью перемычек вместо вывода 12 использовать вывод 2, а вместо вывода 11 – вывод 9.

В таком режиме возможно совместное использование модуля M-Shield и Ethernet Shield, но нужно отметить, что выведенные на модуле штыревые разъемы для сервоприводов уже недоступны, т.к. один из них находится на занятом выводе 9, а второй на используемом SPI выводе 10.
Данный модифицированный режим работы требует изменений в управляющей библиотеке. Нами модифицирована библиотека AFMotor-08_12_2009, но ее работа протестирована только в режимах управления двигателями постоянного тока:
http://www.freeduino.ru/arduino/files/AFMotorSPI-08_12_2009.zip
Второе отличие версии v3 – возможность стыковки не только с полноразмерной Arduino платой, но и с платами в формате Nano. В законченных решениях можно даже впаять плату Freeduino Nano вместо гнезд, и получить очень компактное устройство. Важно только не перепутать ориентацию платы.

Важно отметить, что модуль не может использоваться как полноценный переходник с формата Nano на полноразмерный формат Arduino, т.к. между разъемами Nano и Arduino разведены только используемые M-Shield выводы.
В последней модификации модуля применены "проходные" разъемы, позволяющие состыковывать M-Shield v3 и другие модули без сдвига относительно платы Arduino.
В комплект поставки входит M-Shield v3, разъемы Arduino Nano и разъемы «классической» Arduino. При заказе монтажа соответствующие разъемы монтируются. Если монтаж разъемов не заказывать, то при необходимости их можно будет смонтировать самостоятельно.
Библиотека AFMotor
Существует удобная библиотека, упрощающая работу с модулем M-Shield, скачать которую можно с сайта разработчика, или у нас:
http://www.ladyada.net/make/mshield/download.html
http://www.freeduino.ru/arduino/files/AFMotor-08_12_2009.zip
Для работы в SPI-совместимом режиме необходима модифицированная библиотека:
http://www.freeduino.ru/arduino/files/AFMotorSPI-08_12_2009.zip
Как и в большинстве случаев, установка библиотеки сводится к распаковке архива в подпапку \hardware\libraries\ папки с ПО Arduino.
Управление двигателями постоянного тока
Для управления двигателями постоянного тока используется класс AF_DCMotor. Ниже рассмотрены его основные методы и приведены примеры работы.
Определение параметров двигателя
Убедитесь, что параметры двигателя – номинальное напряжение и ток соответствуют используемому источнику питания и параметрам M-Shield.
Если потребляемый двигателем ток превышает номинальное для драйвера L293D значение в 0,6 А, можно увеличить значение продолжительного тока до 1,2 А путем параллельного подключения двигателя одновременно к двум портам, например к М1 и М2 и составлением соответствующего алгоритма управления.
Кроме того, с целью увеличения допустимой токовой нагрузки в два раза, можно напаять на микросхему L293D «нога к ноге» ещё одну L293D, это позволит управлять более мощными двигателями с максимально-продолжительным током в каждом канале управления до 1,2 А.
Вы также можете использовать две платы M-Shield, установив одну в разъемы другой, и подключив каждый двигатель к одноименным каналам обеих плат.
Подключение двигателей постоянного тока
Расположенные на плате M-Shield 5-контактные клеммники предназначены для подключения двигателей. Центральный контакт каждого клеммника – «земля», двигатели постоянного тока подключаются к крайним парам контактов, обозначенных по номерам каналов M1, M2, M3, M4.
AF_DCMotor – конструктор объекта
Вызов:
AF_DCMotor имя_объекта(номер_канала);
Создает экземпляр класса AF_DCMotor, принимает номер канала После создания объекта можно вызывать его методы.
Метод AF_DCMotor::setSpeed
Вызов:
имя_объекта.setSpeed(скважность)
Задает скважность ШИМ на канале в диапазоне от 0 до 255. Значение 0 соответствует напряжению 0 В на двигателе, значение 255 – полному напряжению питания.
Метод AF_DCMotor::run
Вызов:
имя_объекта.run(направление)
Задает направление движения двигателя (полярность прикладываемого напряжения). Параметр «направление» может принимать одно из следующих значений:
FORWARD – прямое направление вращения
BACKWARD – обратное направление вращения
RELEASE – остановка двигателя
Пример управления двигателями постоянного тока
Ниже приведен пример простой программы, осуществляющей ступенчатое изменение скорости вращения двигателя с интервалами в 3 секунды в следующей последовательности: +50, +75%, +50%, STOP, -50%, -75%, -50%, STOP. После завершения цикл будет повторяться.
//Создаем объект для двигателя на 1 канале (M1)
AF_DCMotor motor(1);
void setup() {
}
void loop() {
//Задаем направление движение вперед
motor.run(FORWARD);
//Устанавливаем скорость 50%
motor.setSpeed(128);
//пауза 3 секунды - двигатель крутится
delay(3000);
//увеличиваем скорость до 75%, и пауза 3 сек.
motor.setSpeed(192);
delay(3000);
//Снижаем скорость до 50%, и пауза 3 сек.
motor.setSpeed(128);
delay(3000);
//Останавливаем двигатель, и пауза 3 сек.
motor.run(RELEASE);
delay(3000);
//Переключаем направление вращения
//Двигатель начнет вращаться со скоростью 50%
motor.run(BACKWARD);
//пауза 3 секунды - двигатель крутится
delay(3000);
//увеличиваем скорость до 75%, и пауза 3 сек.
motor.setSpeed(192);
delay(3000);
//Снижаем скорость до 50%, и пауза 3 сек.
motor.setSpeed(128);
delay(3000);
//Останавливаем двигатель, и пауза 3 сек.
motor.run(RELEASE);
delay(3000);
}
Управление шаговыми двигателями
Благодаря тому, что вращение ротора осуществляется фиксированными шагами, без необходимости обратной связи по положению, шаговые двигатели часто применяются в различных устройствах и механизмах.
Подключение шаговых двигателей
M-Shield поддерживает одновременное подключение двух шаговых двигателей. Управление шаговыми двигателями осуществляется с помощью той же библиотеки AFMotor, что и для работы с двигателями постоянного тока.
Для подключения однополярного шагового двигателя к M-shield необходимо определиться, какой из выводов двигателя подключен к его соответствующей обмотке. Если у двигателя пять выводов, то один из них является средней точкой двух его обмоток, которая подключается к электрической цепи GND модуля. Остальные выводы это начало, и конец обмоток, которые подключаются к портам M-shield: M1 и M2 или к M3 и M4.
Подключение двуполярного шагового двигателя к M-Shield производится аналогично однополярному за исключением того, что у него отсутствует вывод средней точки обмоток двигателя.
AF_Stepper – конструктор объекта
Вызов:
AF_Stepper имя_объекта(число шагов, канал);
Создает экземпляр класса AF_Stepper, принимает число шагов на один оборот двигателя и номер канала. При подключении двигателя к портам M1 и M2 указывайте 1 в качестве номера канала, при подключении к портам M3 и M4 указывайте 2.
Метод AF_Stepper::setSpeed – задание скорости
Вызов:
имя_объекта.setSpeed(скорость)
Задает частоту вращения ротора в оборотах в минуту. При указании частоты вращения больше рекомендованной для используемого двигателя с учетом напряжения питания и момента сопротивления на валу, возможно пропускание двигателем шагов.
Метод AF_DCMotor::step – вращение на нужное число шагов
Вызов:
имя_объекта.step(число шагов, направление, тип шага)
число шагов – требуемое число шагов;
направление – либо FORWARD (вперед), либо BACKWARD (назад);
тип шага – один из 4 вариантов: SINGLE, DOUBLE. INTERLEAVE или MICROSTEP.
SINGLE – активация одной обмотки двигателя для совершения шага;
DOUBLE – активация двух обмоток двигателя, что обеспечивает больший вращающий момент;
INTERLEAVE – чередование между SINGLE и DOUBLE режимом, с двойной точностью и половинной скоростью вращения.
MICROSTEP – применение ШИМ для управления шаговым двигателем двигателем.
Задает направление движения двигателя (полярность прикладываемого напряжения). Параметр «направление» может принимать одно из следующих значений:
FORWARD – прямое направление вращения
BACKWARD – обратное направление вращения
RELEASE – остановка двигателя
Метод AF_Stepper::release – отключение двигателя
Вызов:
имя_объекта.release ()
По умолчанию шаговый двигатель удерживает свое положение после завершения шага, однако вызов release() отключает обмотки двигателя для осуществления свободного вращения ротора.
Пример управления шаговым двигателем
Ниже приведен пример простой программы, осуществляющей управление шаговым двигателем ST28, подключенным к портам M3 и M4 модуля.

У шагового двигателя ST28 32 шага на оборот, а также встроенный редуктор с передаточным числом 64, что дает 32*64=2048 шагов двигателя на один оборот выходного вала. В приведенном примере осуществляется поворот на один оборот в прямом направлении в режиме SINGLE, на один оборот в обратном в режиме DOUBLE, на пол-оборота в прямом направлении в режиме INTERLEAVE, и на пол-оборота в обратном в режиме MICROSTEP.
//Создаем объект для двигателя на 2 канале (M3 и M4)
AF_Stepper motor(2048, 2);
void setup() {
motor.setSpeed(10); // 10 оборотов в минуту
}
void loop() {
motor.step(2048, FORWARD, SINGLE); //1 оборот
motor.step(2048, BACKWARD, DOUBLE); //1 оборот
//в режиме INTERLEAVE скорость в 2 раза ниже, а шаги в
//2 раза меньше. То же число полушагов даст 0.5 оборота
motor.step(2048, FORWARD, INTERLEAVE); //0.5 оборота
motor.step(1024, BACKWARD, MICROSTEP); //0.5 оборота
motor.release();
delay(1000);
}
...to be continued. Планируется расширение документации примерами работы с сервоприводами